(不定期更新)
4 温度及控制
温度控制的官方参考页面:http://smoothieware.org/temperaturecontrol
4.1 配置NTC温度传感器
4.1.1 使用3点设置法
在配置文件相应位置添加项目(例如加热头)
|
temperature_control.hotend.rt_curve 25,100000,150,1665,240,266.2
|
NTC 100K B3950的 25,150,240度时的电阻值
4.1.2 参数设置法
用M代码设置
|
M305 S0 B3950 R100000 T25
|
4.1.3 Steinhart Hart参数法
官方原档认为这种方法是最准确的。
每个NTC需要3个参数:I Steinhart,J Steinhart,K Steinhart。可由固件自动计算。
自动计算示例如下:
|
@calc_thermistor 25,100000,150,1665,240,266.2
|
从返回值中可以看到计算得到的3个值:
|
Steinhart Hart coefficients: I0.000744991004467010 J0.000212162165553309 K0.000000109054624886
Paste the above in the M305 S0 command, then save with M500
|
或 写入配置文件:
|
temperature_control.hotend.coefficients 0.000744991004467010,0.000212162165553309,0.000000109054624886
|
或 加“-s0”参数,表示为s0计算这个值,注意小写s
|
@calc_thermistor -s0 25,100000,150,1665,240,266.2
|
|
Steinhart Hart coefficients: I0.000744991004467010 J0.000212162165553309 K0.000000109054624886
Setting Thermistor 0 to those settings, save with M500
|
4.2 配置热电偶温度传感器
热电偶的设置暂时没有测试
4.3 PID温度控制方法
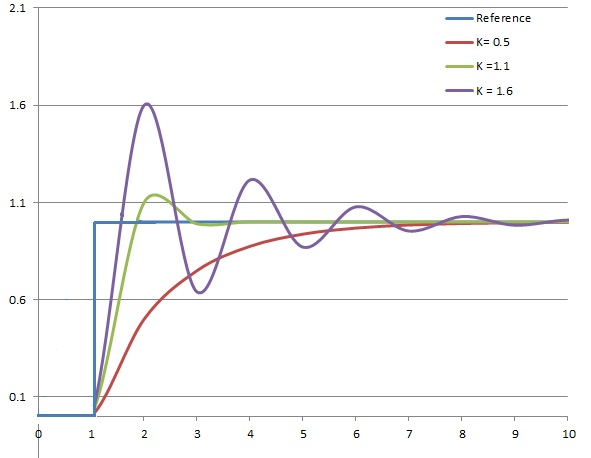
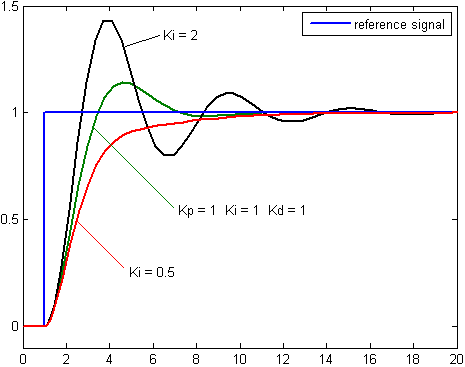
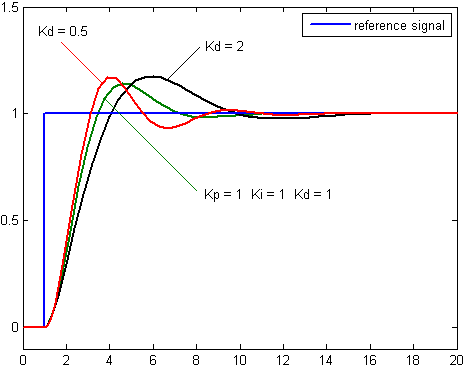
4.3.1 PID温控介绍
4.3.2 参数设置
设定PID参数
这个设定只在内存中生效,并没写到配置文件中
用M500指令写入到配置文件中
4.3.3 参数自整定
PID自整定算法参考:(这里有详细的测量和计算方法)
http://brettbeauregard.com/blog/2012/01/arduino-pid-autotune-library/

对挤出头温控进行自整定
指令:
解释:对E0按190度进行自整定
自整定过程会将温度升至190度,并在190度上下震荡几个周期,计算得到如下应答:
|
00:18:17.232 : Cycle 4: max: 202.865, min: 188.072, avg separation: 0.362854
00:18:17.233 : Ku: 43.8957, Pu: 30.05
00:18:17.233 : Trying:
00:18:17.233 : Kp: 26.3
00:18:17.233 : Ki: 1.753
00:18:17.233 : Kd: 99
00:18:17.234 : PID Autotune Complete! The settings above have been loaded into memory, but not written to your config file.
|
|

